
Objetivo
El objetivo es adquirir conocimientos prácticos sobre brazos robóticos para poder diseñar uno propio adaptado a mis necesidades.
Para ello tenía 2 opciones: Comprar uno de los muchos que hay en el mercado, con las limitaciones habituales de expansión y con software cerrado o encontrar algún proyecto open source que pudiera fabricarme yo mismo.
Por suerte encontré el siguiente proyecto open source:
http://es-aivrobotics.blogspot.com.es/p/aura.html
Que como se ve cumple todos mis requisitos, adaptable, mejorable, software 100% libre, componentes estandarizados y barato.
- Fase 2 del proyecto.
Aunque este era el objetivo inicial, el proyecto acabó convirtiéndose en mi proyecto de fin de carrera (PFC). Al proyecto Aura le añadí conectividad bluetooth y un módulo de ultrasonidos.
Para el control del brazo, aprovechando el nuevo módulo bluetooth, creé aplicaciones de Android, con el software MIT APP Inventor 2, para realizar el control remoto mediante cualquier dispositivo Android.
El módulo de ultrasonidos permite buscar automáticamente los objetos a agarrar. Incluso se ha programado el brazo con un destino predefinido, con lo que siembre deja los objetos en el sitio programado sin importar donde se encontraba antes el objeto.
Piezas

Piezas impresas y parcialmente ensambladas. 
Detalle de la base del robot. 
Detalle de la pinza.
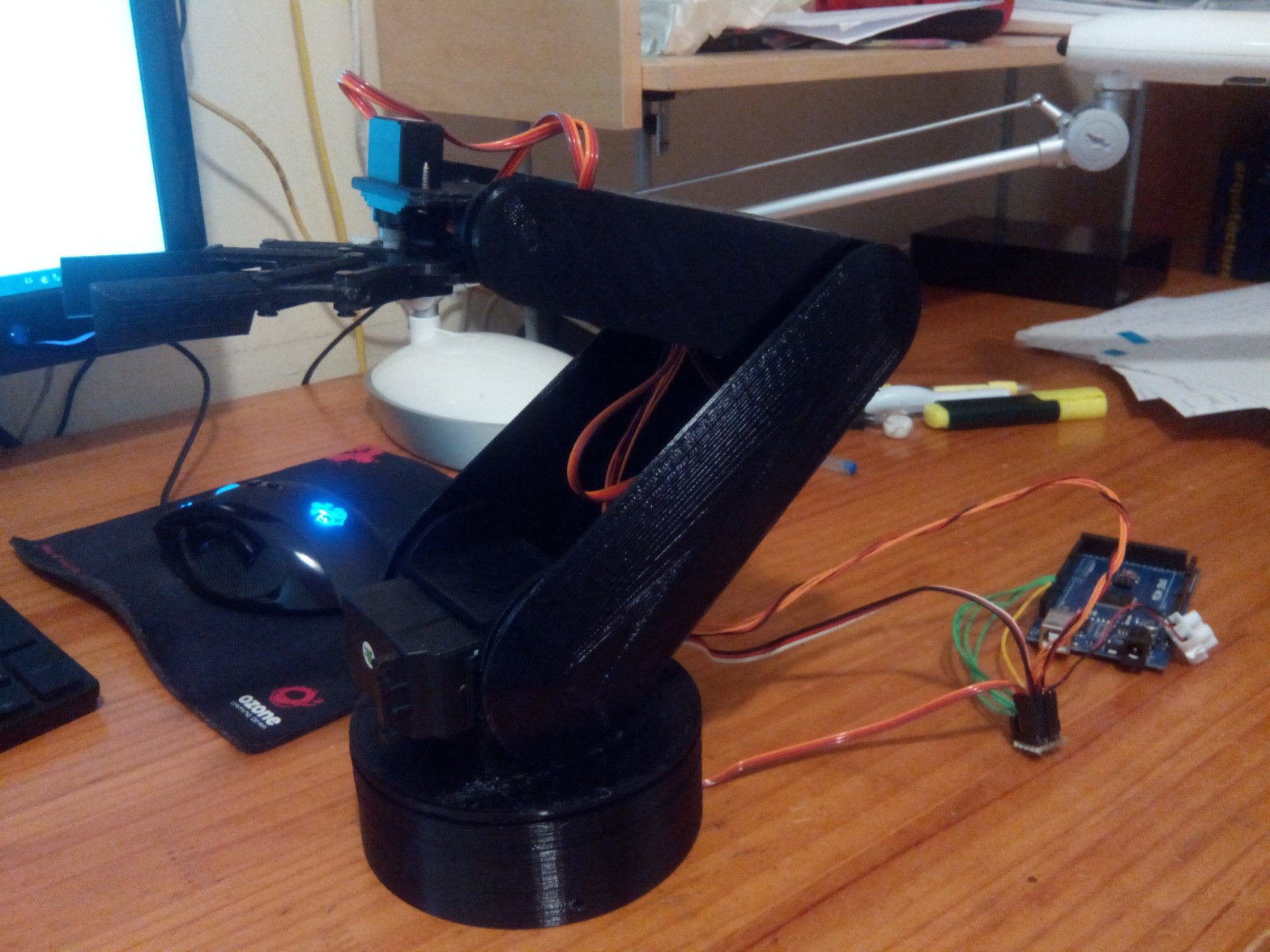
Brazo montado

A continuación se pueden ver los vídeos de funcionamiento del brazo robótico Aura en distintos modos:
- 1 modo automático.
- 2 modo manual del brazo.
- 3 modo manual de la pinza.
Fase 2 del proyecto
El proyecto se retomó como parte de mi proyecto de final de carrera (PFC). Para ello añadí diversas funcionalidades al bazo robótico.
- Módulo bluetooth:
Se incorpora al controlador Arduino el módulo bluetooth HC-06. Este módulo nos permitirá conectar un dispositivo Android (smartphone) para controlar el brazo.
Para ello he desarrollado mis propias aplicaciones en Android para este propósito. Programadas en «MIT APP Inventor 2»
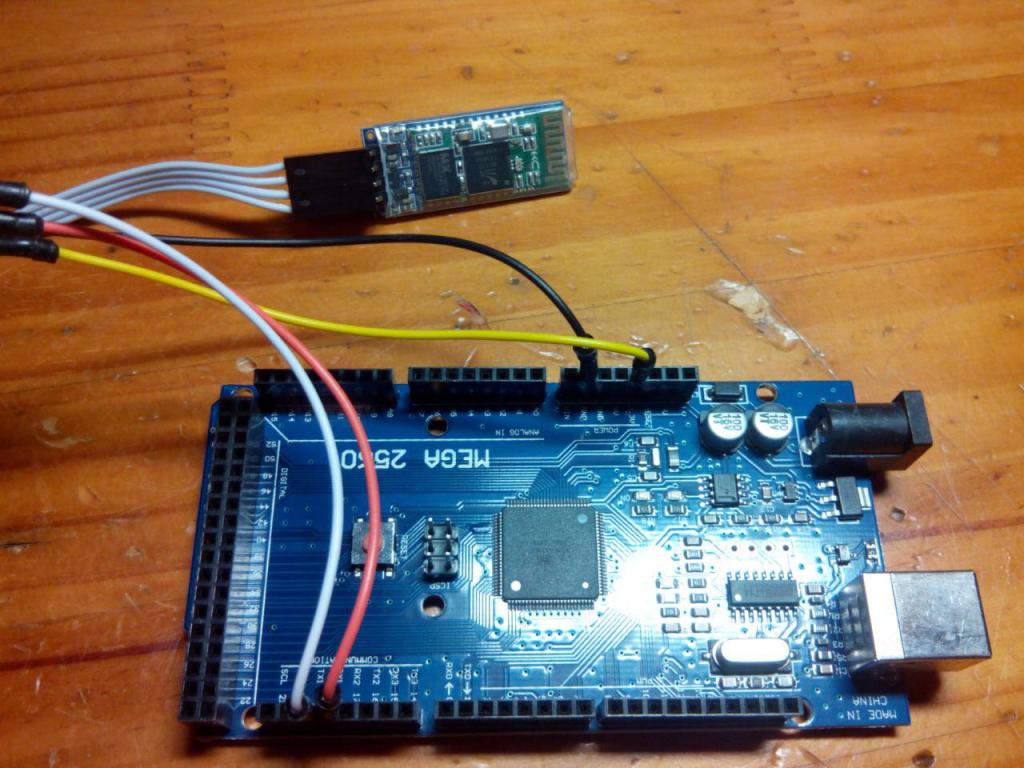
Antena bluetooth conectada al controlador Arduino. 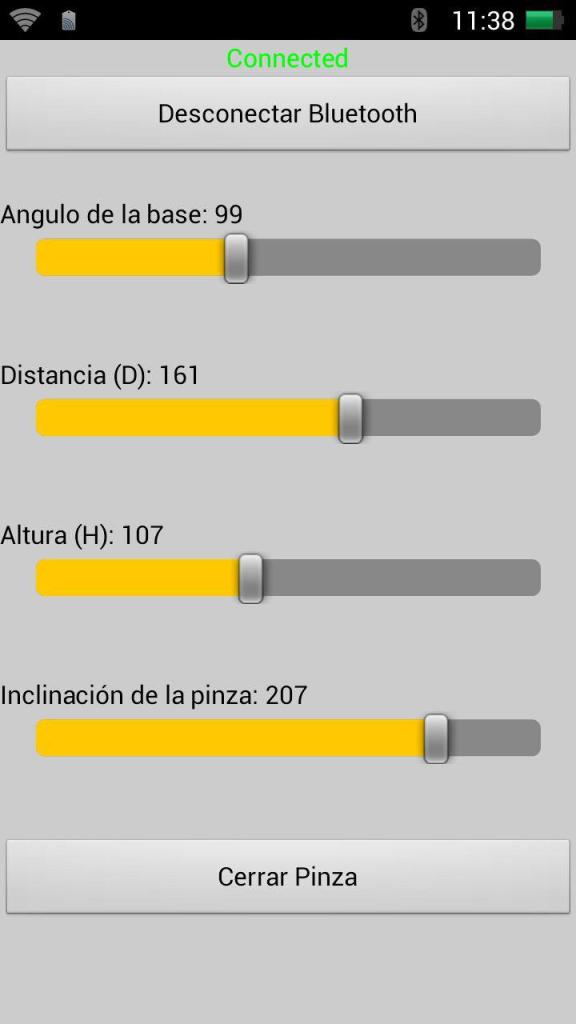
Una de las aplicaciones Android de control.
- Módulo emisor y receptor de ultrasonidos:
Se acopla al brazo robótico el módulo de ultrasonidos HC-SR04 para Arduino. Este módulo nos permitirá medir distancias. Con ello podemos localizar objetos o incluso ajustar los límites de movimiento del brazo.
El módulo se acoplará en la parte inferior del brazo, permitiendo únicamente el giro alrededor del eje vertical. Otra opción hubiera sido instalarlo solidario a la pinza.

Módulo de ultrasonidos HC-SR04. 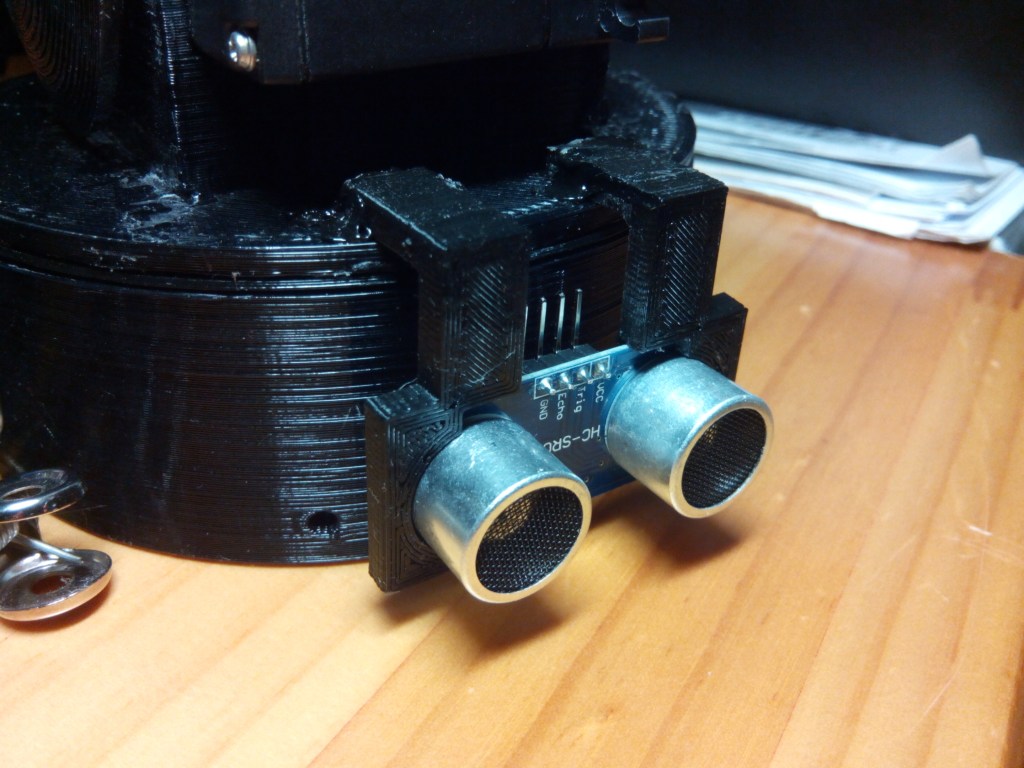
Módulo de ultrasonidos acoplado a la base del brazo.
Esquemas de cableado
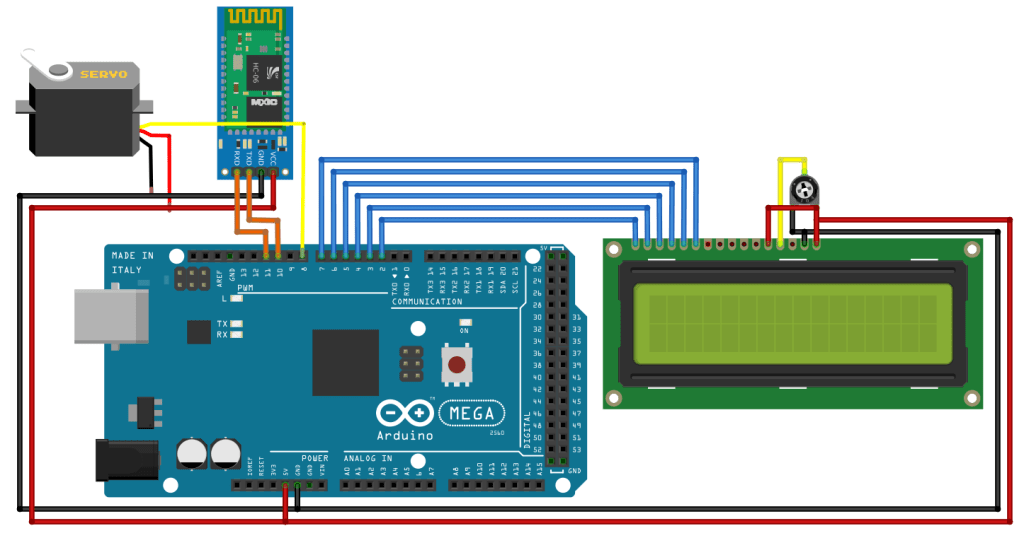
Cableado de Arduino + LCD + Antena bluetooth. 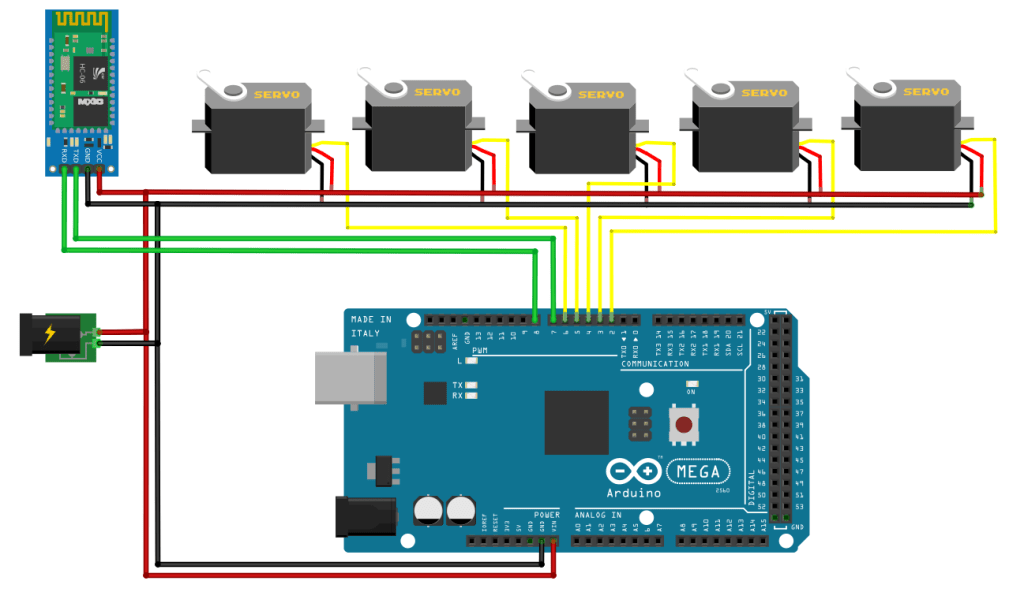
Cableado de los servomotores. 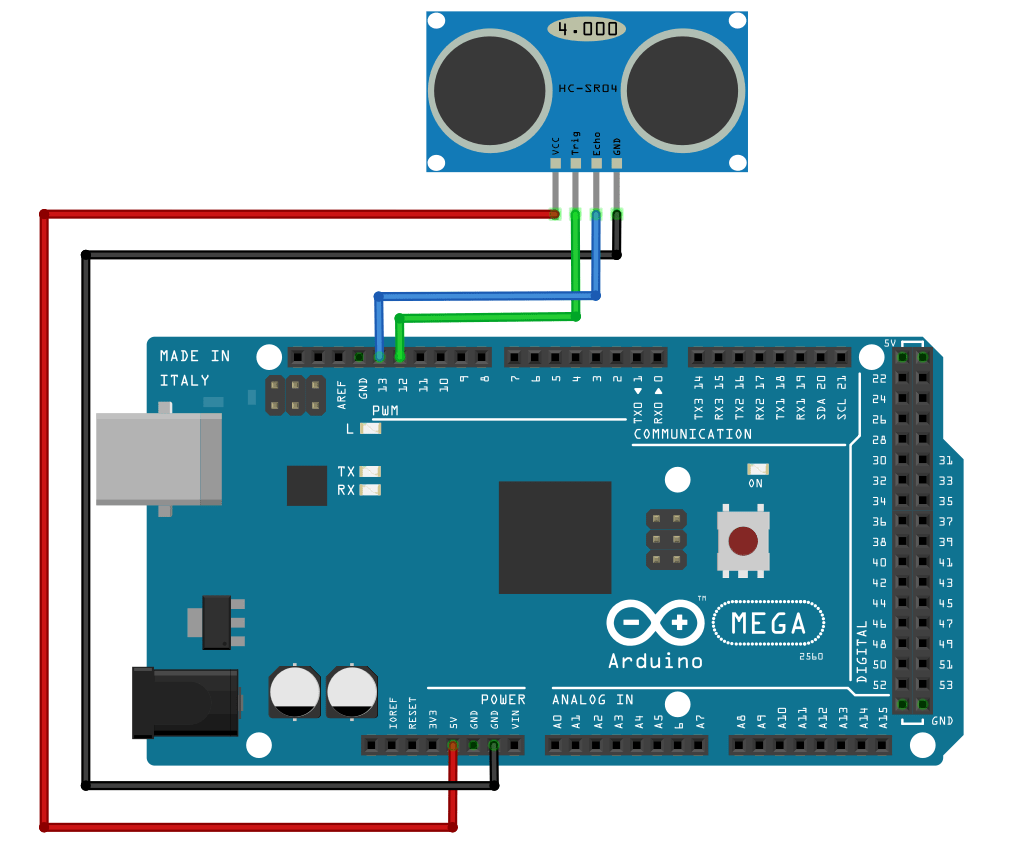
Cableado del módulo de ultrasonidos.
Aplicaciones Android
Interfaces de la aplicación de MIT APP Inventor 2. 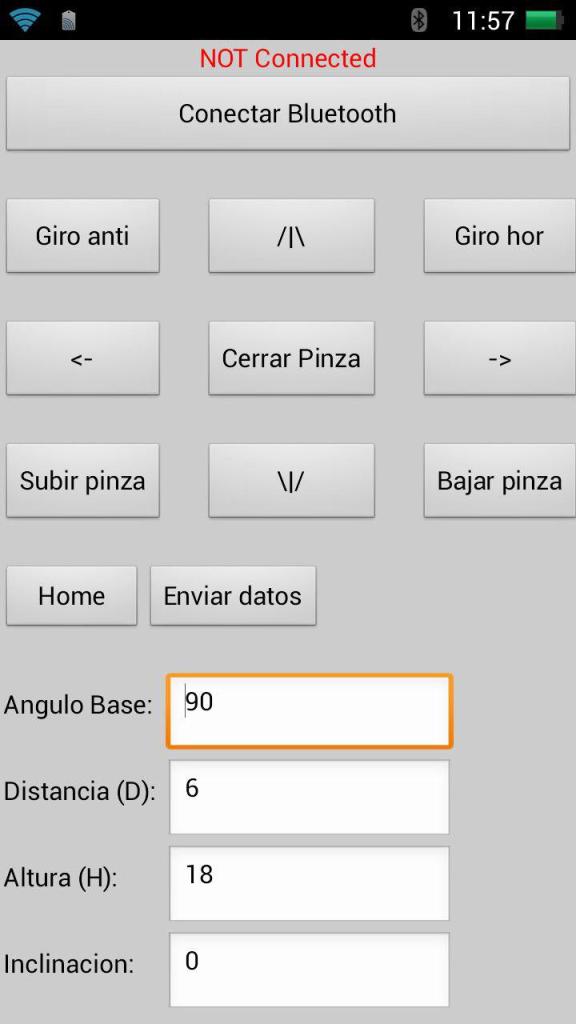
Aplicación de control manual. 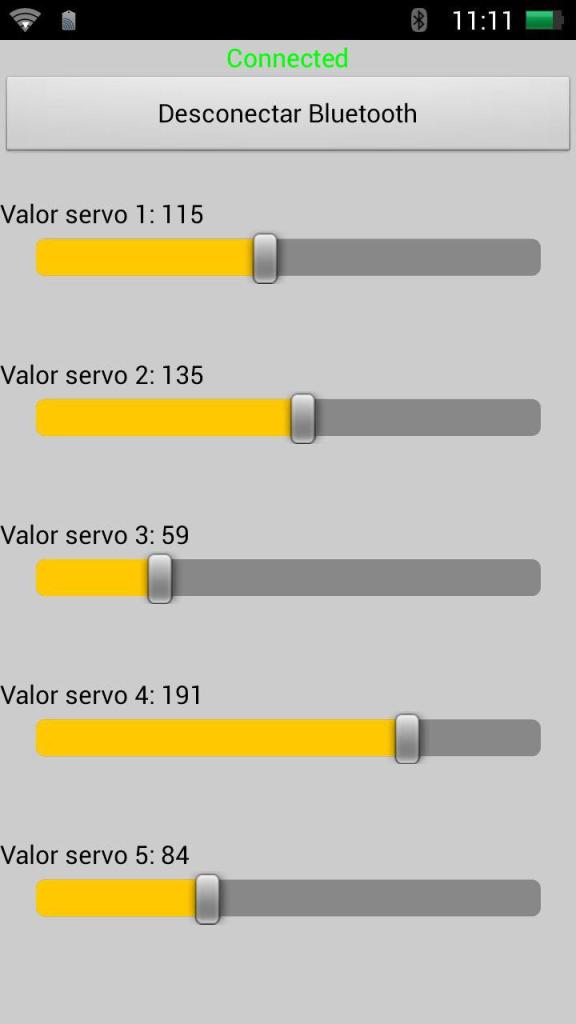
Aplicación de control semi-automático.
Galería
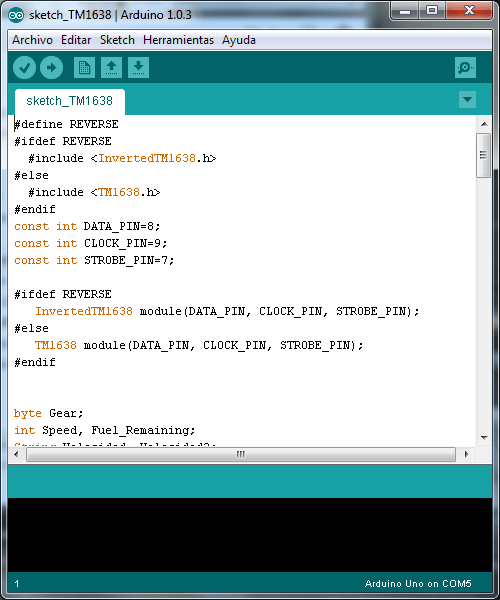
Arduino IDE. 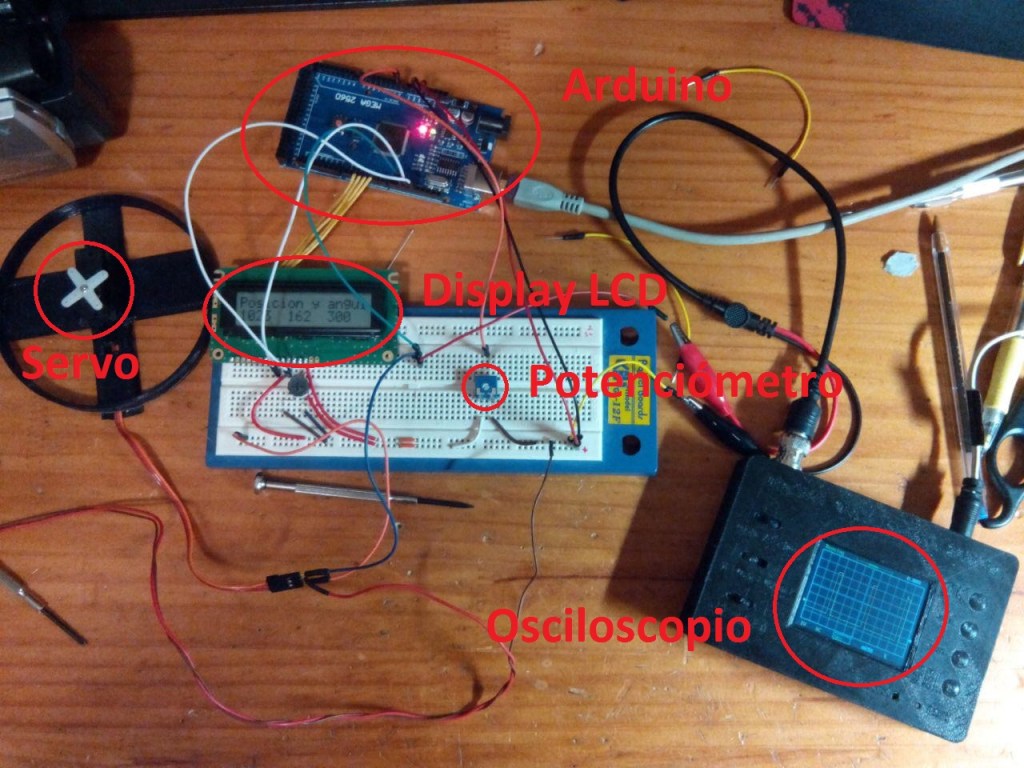
Calibración de los servos. 
Calibración fina del brazo. 
Detalle del ensamblaje con el método de soldadura de PLA. 
Placas de conexiones temporal.
Estado actual del proyecto
El brazo robótico fue donado a la Universidad de Valladolid (UVA). El brazo está disponible para los alumnos que quieran seguir investigando y ampliando funcionalidades.
